Research and Areas of Interest
Areas of Interest

Below is a summary of several of the projects I have contributed to. Please visit the Publications page for the most up to date summary of my research.
- Osteoporosis, imaging, and fracture risk assessment (see Publications)
- Stepping and Balance (characterization and motion simulation)
- Musculoskeletal Modeling
- Motion Capture
- Other (some additional small projects)
Stepping and Balance
Human figure models are used to simulate worker behavior during
industrial jobs that require the worker to take multiple steps around
the work cell per job cycle. Ergonomic analyses performed using human
figure models can be used to define health risks, improve the
environment layout, and reduce physical stresses. However, commercial
digital human models, although capable of simulating cyclical gait, do
not have the capability to accurately simulate the non-cyclical
stepping behavior that occurs in these industrial work cells. Moreover,
the biomechanical basis of this task-dependent stepping behavior is not
well understood. Related research has focused on: 1) Postural
stability, predictive equilibrium models, and health effects from
different lifting postures and/or foot configurations, 2) Control
strategies and behaviors for lifting, cyclical gait, and quiet stance,
and 3) Biomechanical effects when performing lifting or load transfer
tasks. However, the amount of literature addressing the interaction
between foot placements and work cell load transfer tasks is small. My
research focuses on the prediction and biomechanics of lower extremity
movements during manual material handling transfer tasks.
Videos summarizing several components of this work:
Transfers and foot placements by experienced manual material handlers
Laboratory study
Implementation of step behavior and scaling foot placement prediction (based on task and worker parameters)
Implementation
of step predictions used as constraint to drive whole-body simulation
(courtesy of Matt Reed)
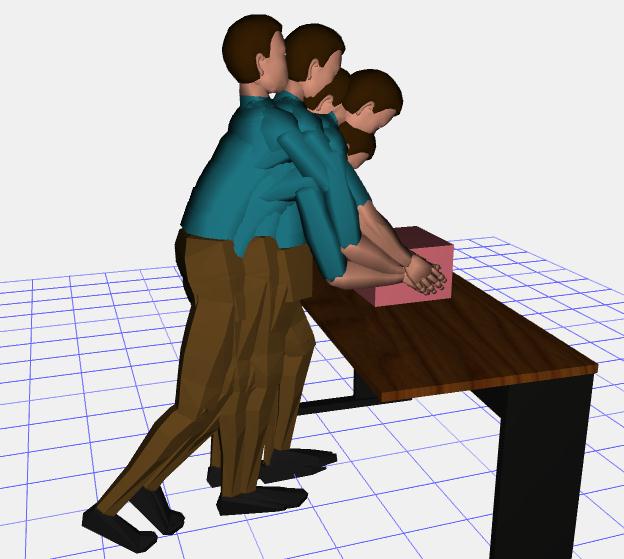
Musculoskeletal Modeling
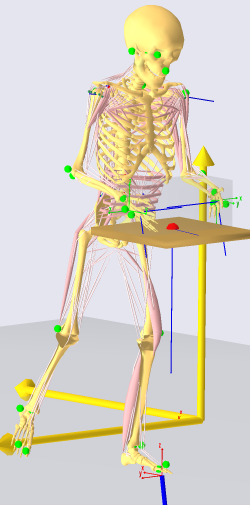
Most current applications of digital human figure models for ergonomic assessments of manual tasks focus on the analysis of a static posture. Tools available for static analysis include joint-specific strength, calculation of joint moments, balance maintenance capability, and low-back compression or shear force estimates. Yet, for many tasks, the inertial loads due to acceleration of body segments or external objects may contribute significantly to internal body forces and tissue stresses. Due to the complexity of incorporating the dynamics of motion into analysis, most commercial software packages (i.e. Jack, Safework) used for ergonomic assessment do not have the capacity to include dynamic effects. Thus, commercial human modeling packages rarely provide an opportunity for the user to determine if a static analysis is sufficient. The feasibility and tractability of performing dynamical ergonomic analysis with the AnyBody model was assessed for the analysis of an asymmetric lifting task. Future research in this area must focus on better (and in many areas the initial) definition of 'safe' criteria (e.g. cumulative and acute) for tissue stress levels for which combined with the results from a musculoskeletal simulation, engineering design descisions can be applied.
Example videos from several components of this work:
Two-handed manual material handling musculoskeletal simulation
Using
musculoskeletal simulation output to drive a finite element simulation
- evaluating the design of a proximal radial fixed plate implant
subject to loads imposed during wheel chair propulsion
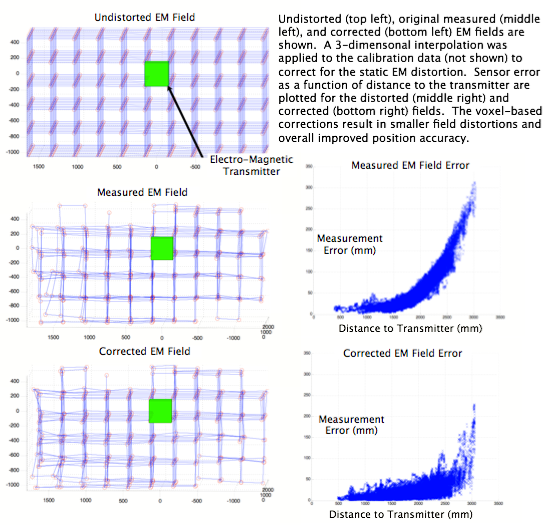
Motion Capture
Motion capture technology is really neat. Being able to capture the movements of a human, animal, environment, and/or object to be able to manipulate that motion in a computer environment is no small feat. Unfortunately, I think many mocap users lose sight of the limitations of motion capture (and/or the particular system they are using) and take at face value the accuracy metrics provided by the manufacturer (...but is it in the best interest of the manufacturer to provide average, worst-case, or best-case performance measures??). Additionally, I have yet to find a motion capture system that is truly 'turn-key', no matter how many times one has been self-proclaimed. I think this is a technologically exciting area where much development is still needed. Below is some work I did with an electromagnetic based mocap system where I dynamically quantifyied the positional errors due to environmental disturbances (i.e. metal in the field) and subsequently corrected for those errors. In the future, I hope to become more involved in the development and validation of mocap systems and their use in the engineering community.
©2014 David W. Wagner